this notebook with your code (doesn’t matter how awful it is 😃
privately to Nadia Chirkova at Facebook or to info@deepbayes.ru. The first three participants will receive a present. Do not make spoilers to other participants!
Please, note that you have only one attempt to send a message!
1 2 3
import numpy as np from matplotlib import pyplot as plt %matplotlib inline
defcalculate_log_probability(X, F, B, s): """ Calculates log p(X_k|d_k, F, B, s) for all images X_k in X and all possible face position d_k. Parameters ---------- X : array, shape (H, W, K) K images of size H x W. F : array, shape (H, w) Estimate of prankster's face. B : array, shape (H, W) Estimate of background. s : float Estimate of standard deviation of Gaussian noise. Returns ------- ll : array, shape(W-w+1, K) ll[dw, k] - log-likelihood of observing image X_k given that the prankster's face F is located at position dw """ # your code here H = X.shape[0] W = X.shape[1] K = X.shape[2] w = F.shape[1] ll = np.zeros((W-w+1,K)) for k inrange(K): X_minus_B = X[:,:,k]-B[:,:] XB = np.multiply(X_minus_B,X_minus_B) for dk inrange(W-w+1): F_temp = np.zeros((H,W)) F_temp[:,dk:dk+w] = F X_minus_F = X[:,:,k] - F_temp[:,:] XF = np.multiply(X_minus_F,X_minus_F) XB_mask = np.ones((H,W)) XB_mask[:,dk:dk+w] = 0 XF_mask = 1-XB_mask XB_temp = np.multiply(XB,XB_mask) XF_temp = np.multiply(XF,XF_mask) Sum = (np.sum(XB_temp+XF_temp))*(-1/(2*s**2))-H*W*np.log(np.sqrt(2*np.pi)*s) ll[dk][k]=Sum return ll
1 2 3 4 5 6 7
# run this cell to test your implementation expected = np.array([[-3541.69812064, -5541.69812064], [-4541.69812064, -6741.69812064], [-6141.69812064, -8541.69812064]]) actual = calculate_log_probability(tX, tF, tB, ts) assert np.allclose(actual, expected) print("OK")
defcalculate_lower_bound(X, F, B, s, a, q): """ Calculates the lower bound L(q, F, B, s, a) for the marginal log likelihood. Parameters ---------- X : array, shape (H, W, K) K images of size H x W. F : array, shape (H, w) Estimate of prankster's face. B : array, shape (H, W) Estimate of background. s : float Estimate of standard deviation of Gaussian noise. a : array, shape (W-w+1) Estimate of prior on position of face in any image. q : array q[dw, k] - estimate of posterior of position dw of prankster's face given image Xk Returns ------- L : float The lower bound L(q, F, B, s, a) for the marginal log likelihood. """ # your code here K = X.shape[2] ll = calculate_log_probability(X,F,B,s) ll_expectation = np.multiply(ll,q) q_expectation = np.multiply(np.log(q),q) dk_expection = 0 for k inrange(K): dk_expection += np.multiply(np.log(a),q[:,k]) L = np.sum(ll_expectation)-np.sum(q_expectation)+np.sum(dk_expection) return L
1 2 3 4 5
# run this cell to test your implementation expected = -12761.1875 actual = calculate_lower_bound(tX, tF, tB, ts, ta, tq) assert np.allclose(actual, expected) print("OK")
Use already implemented calculate_log_probability!
For computational stability, perform all computations with logarithmic values and apply exp only before return. Also, we recommend using this trick:
$$\beta_i = \log{p_i(\dots)} \quad\rightarrow \quad
\frac{e^{\beta_i}}{\sum_k e^{\beta_k}} =
\frac{e^{(\beta_i - \max_j \beta_j)}}{\sum_k e^{(\beta_k- \max_j \beta_j)}}$$
defrun_e_step(X, F, B, s, a): """ Given the current esitmate of the parameters, for each image Xk esitmates the probability p(d_k|X_k, F, B, s, a). Parameters ---------- X : array, shape(H, W, K) K images of size H x W. F : array_like, shape(H, w) Estimate of prankster's face. B : array shape(H, W) Estimate of background. s : float Eestimate of standard deviation of Gaussian noise. a : array, shape(W-w+1) Estimate of prior on face position in any image. Returns ------- q : array shape (W-w+1, K) q[dw, k] - estimate of posterior of position dw of prankster's face given image Xk """ # your code here ll = calculate_log_probability(X,F,B,s) K = X.shape[2] for k inrange(K): max_ll = ll[:,k].max() ll[:,k] -= max_ll ll[:,k] = np.exp(ll[:,k])*a denominator = np.sum(ll[:,k]) ll[:,k] /= denominator q = ll return q
1 2 3 4 5 6 7
# run this cell to test your implementation expected = np.array([[ 1., 1.], [ 0., 0.], [ 0., 0.]]) actual = run_e_step(tX, tF, tB, ts, ta) assert np.allclose(actual, expected) print("OK")
defrun_m_step(X, q, w): """ Estimates F, B, s, a given esitmate of posteriors defined by q. Parameters ---------- X : array, shape (H, W, K) K images of size H x W. q : q[dw, k] - estimate of posterior of position dw of prankster's face given image Xk w : int Face mask width. Returns ------- F : array, shape (H, w) Estimate of prankster's face. B : array, shape (H, W) Estimate of background. s : float Estimate of standard deviation of Gaussian noise. a : array, shape (W-w+1) Estimate of prior on position of face in any image. """ # your code here K = X.shape[2] W = X.shape[1] H = X.shape[0] a = np.sum(q,axis=1) / np.sum(q)
F = np.zeros((H,w)) for k inrange(K): for dk inrange(W-w+1): F+=q[dk][k]*X[:,dk:dk+w,k] F = F / K B = np.zeros((H,W)) denominator = np.zeros((H,W)) for k inrange(K): for dk inrange(W-w+1): mask = np.ones((H,W)) mask[:,dk:dk+w] = 0 B += np.multiply(q[dk][k]*X[:,:,k],mask) denominator += q[dk][k]*mask denominator = 1/denominator B = B * denominator s = 0 for k inrange(K): for dk inrange(W-w+1): F_B = np.zeros((H,W)) F_B[:,dk:dk+w]=F mask = np.ones((H,W)) mask[:,dk:dk+w] = 0 Model = F_B + np.multiply(B,mask) temp = X[:,:,k]-Model[:,:] temp = np.multiply(temp,temp) temp = np.sum(temp) temp *= q[dk][k] s += temp s = np.sqrt(s /(H*W*K)) return F,B,s,a
1 2 3 4 5 6 7 8 9 10 11
# run this cell to test your implementation expected = [np.array([[ 3.27777778], [ 9.27777778]]), np.array([[ 0.48387097, 2.5 , 4.52941176], [ 6.48387097, 8.5 , 10.52941176]]), 0.94868, np.array([ 0.13888889, 0.33333333, 0.52777778])] actual = run_m_step(tX, tq, tw) for a, e inzip(actual, expected): assert np.allclose(a, e) print("OK")
defrun_EM(X, w, F=None, B=None, s=None, a=None, tolerance=0.001, max_iter=50): """ Runs EM loop until the likelihood of observing X given current estimate of parameters is idempotent as defined by a fixed tolerance. Parameters ---------- X : array, shape (H, W, K) K images of size H x W. w : int Face mask width. F : array, shape (H, w), optional Initial estimate of prankster's face. B : array, shape (H, W), optional Initial estimate of background. s : float, optional Initial estimate of standard deviation of Gaussian noise. a : array, shape (W-w+1), optional Initial estimate of prior on position of face in any image. tolerance : float, optional Parameter for stopping criterion. max_iter : int, optional Maximum number of iterations. Returns ------- F, B, s, a : trained parameters. LL : array, shape(number_of_iters + 2,) L(q, F, B, s, a) at initial guess, after each EM iteration and after final estimate of posteriors; number_of_iters is actual number of iterations that was done. """ H, W, N = X.shape if F isNone: F = np.random.randint(0, 255, (H, w)) if B isNone: B = np.random.randint(0, 255, (H, W)) if a isNone: a = np.ones(W - w + 1) a /= np.sum(a) if s isNone: s = np.random.rand()*pow(64,2) # your code here LL = [-100000] for i inrange(max_iter): q = run_e_step(X,F,B,s,a) F,B,s,a = run_m_step(X,q,w) LL.append(calculate_lower_bound(X,F,B,s,a,q)) if LL[-1]-LL[-2] < tolerance : break LL = np.array(LL) return F,B,s,a,LL
1 2 3 4 5
# run this cell to test your implementation res = run_EM(tX, tw, max_iter=10) LL = res[-1] assert np.alltrue(LL[1:] - LL[:-1] > 0) print("OK")
If you have some time left, you can implement simplified version of EM-algorithm called hard-EM. In hard-EM, instead of finding posterior distribution $p(d_k|X_k, F, B, s, A)$ at E-step, we just remember its argmax $\tilde d_k$ for each image $k$. Thus, the distribution q is replaced with a singular distribution:
$$q(d_k) = \begin{cases} 1, , if d_k = \tilde d_k \ 0, , otherwise\end{cases}$$
This modification simplifies formulas for $\mathcal{L}$ and M-step and speeds their computation up. However, the convergence of hard-EM is usually slow.
If you implement hard-EM, add binary flag hard_EM to the parameters of the following functions:
calculate_lower_bound
run_e_step
run_m_step
run_EM
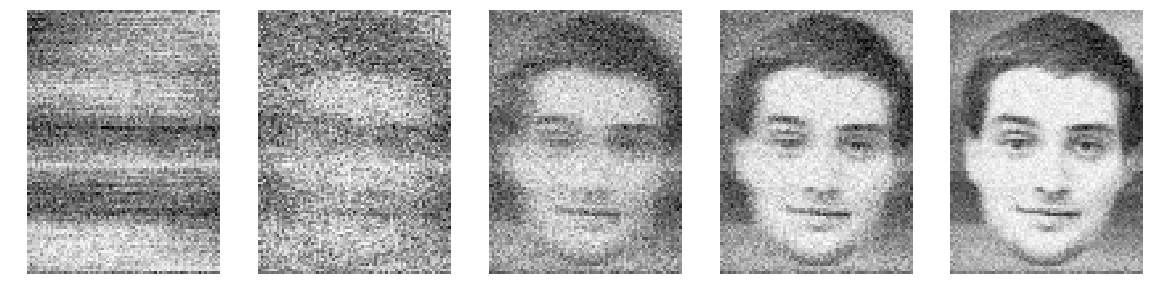
After implementation, compare overall computation time for EM and hard-EM till recognizable F.